publications
Publications listed in reverse chronological order. Asterisk (*) indicates equal contribution.
2025
-
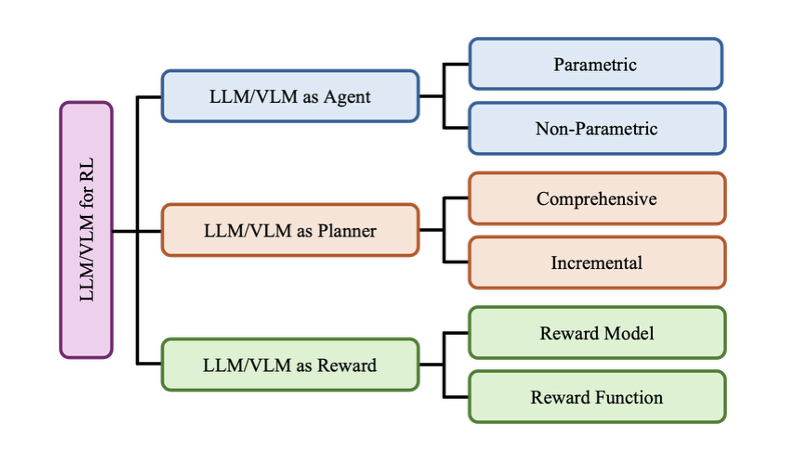 The Evolving Landscape of LLM- and VLM-Integrated Reinforcement LearningSheila Schoepp, Masoud Jafaripour*, Yingyue Cao*, Tianpei Yang, Fatemeh Abdollahi, Shadan Golestan, Zahin Sufiyan, Osmar R. Zaiane, and Matthew E. TaylorIn IJCAI, 2025
The Evolving Landscape of LLM- and VLM-Integrated Reinforcement LearningSheila Schoepp, Masoud Jafaripour*, Yingyue Cao*, Tianpei Yang, Fatemeh Abdollahi, Shadan Golestan, Zahin Sufiyan, Osmar R. Zaiane, and Matthew E. TaylorIn IJCAI, 2025Reinforcement learning (RL) has shown impressive results in sequential decision-making tasks. Meanwhile, Large Language Models (LLMs) and Vision-Language Models (VLMs) have emerged, exhibiting impressive capabilities in multimodal understanding and reasoning. These advances have led to a surge of research integrating LLMs and VLMs into RL. In this survey, we review representative works in which LLMs and VLMs are used to overcome key challenges in RL, such as lack of prior knowledge, long-horizon planning, and reward design. We present a taxonomy that categorizes these LLM/VLM-assisted RL approaches into three roles: agent, planner, and reward. We conclude by exploring open problems, including grounding, bias mitigation, improved representations, and action advice. By consolidating existing research and identifying future directions, this survey establishes a framework for integrating LLMs and VLMs into RL, advancing approaches that unify natural language and visual understanding with sequential decision-making.
2024
-
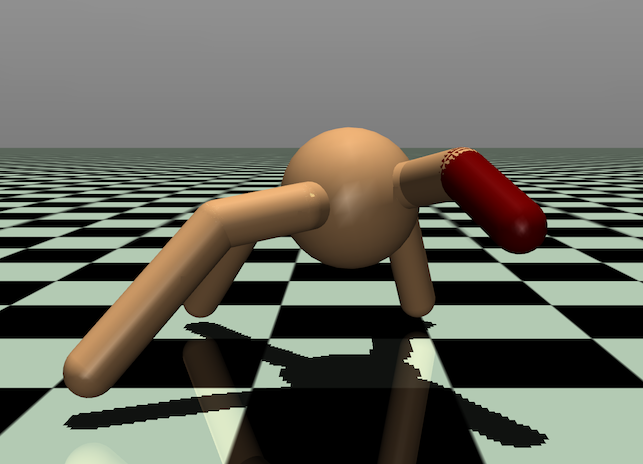 Enhancing Hardware Fault Tolerance in Machines with Reinforcement Learning Policy Gradient AlgorithmsSheila Schoepp, Mehran Taghian, Shotaro Miwa, Yoshihiro Mitsuka, Shadan Golestan, and Osmar R. ZaianeUnder Review, Jul 2024
Enhancing Hardware Fault Tolerance in Machines with Reinforcement Learning Policy Gradient AlgorithmsSheila Schoepp, Mehran Taghian, Shotaro Miwa, Yoshihiro Mitsuka, Shadan Golestan, and Osmar R. ZaianeUnder Review, Jul 2024Industry is rapidly moving towards fully autonomous and interconnected systems that can detect and adapt to changing conditions, including machine hardware faults. Traditional methods for adding hardware fault tolerance to machines involve duplicating components and algorithmically reconfiguring a machine’s processes when a fault occurs. However, the growing interest in reinforcement learning-based robotic control offers a new perspective on achieving hardware fault tolerance. However, limited research has explored the potential of these approaches for hardware fault tolerance in machines. This paper investigates the potential of two state-of-the-art reinforcement learning algorithms, Proximal Policy Optimization (PPO) and Soft Actor-Critic (SAC), to enhance hardware fault tolerance into machines. We assess the performance of these algorithms in two OpenAI Gym simulated environments, Ant-v2 and FetchReach-v1. Robot models in these environments are subjected to six simulated hardware faults. Additionally, we conduct an ablation study to determine the optimal method for transferring an agent’s knowledge, acquired through learning in a normal (pre-fault) environment, to a (post-)fault environment in a continual learning setting. Our results demonstrate that reinforcement learning-based approaches can enhance hardware fault tolerance in simulated machines, with adaptation occurring within minutes. Specifically, PPO exhibits the fastest adaptation when retaining the knowledge within its models, while SAC performs best when discarding all acquired knowledge. Overall, this study highlights the potential of reinforcement learning-based approaches, such as PPO and SAC, for hardware fault tolerance in machines. These findings pave the way for the development of robust and adaptive machines capable of effectively operating in real-world scenarios.